Este post é a segunda parte do Hiperbot 2.0 – Redesign
Hiperbot 2.0 é o redesign de sua primeira versão que foi elaborada em 2013, e agora em 2016 apresenta seu mais novo design.
O projeto surgiu da ideia de se colocar em um único organismo, que se assemelhasse a uma criatura, diversos sensores de modo a capturar sinais galvânicos das folhas de plantas, medindo temperatura ambiente, luminosidade e umidade do solo.
Seu papel principal é enviar dados de um terrário utilizado dentro do projeto Telebiosfera para o servidor do NANO e permitir que todos possam usar seus dados para compor experimentos sonoros e visuais.
A interação das pessoas com as plantas as quais o Hiperbot está conectado através de suas garras gera uma reação sonora e visual de acordo com o que ele recebe de contato.
Esta continuação se propõe a mostrar o restante do desenvolvimento e resultado final até então do projeto, que pretende passar ainda por mais modificações.
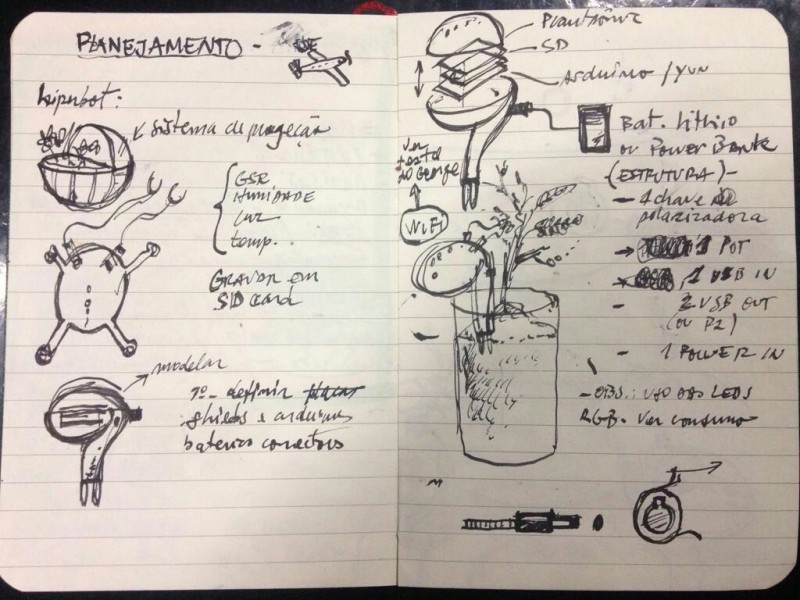
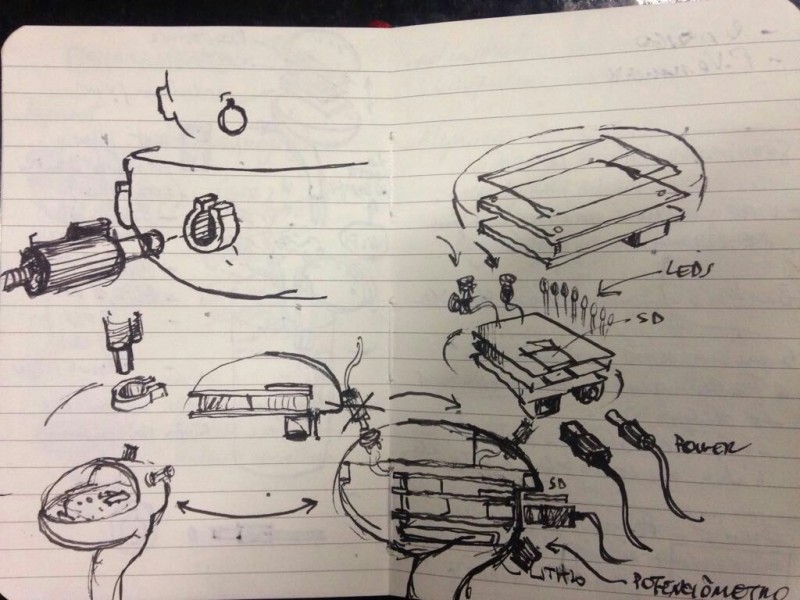
Sketchs de desenvolvimento
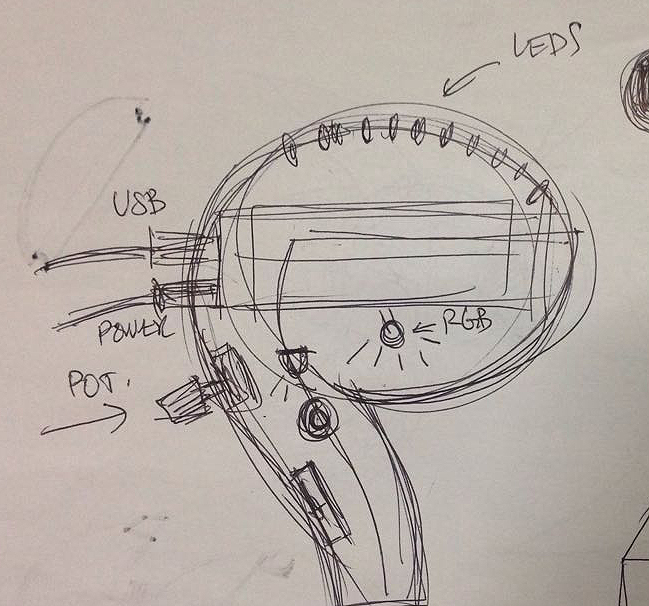
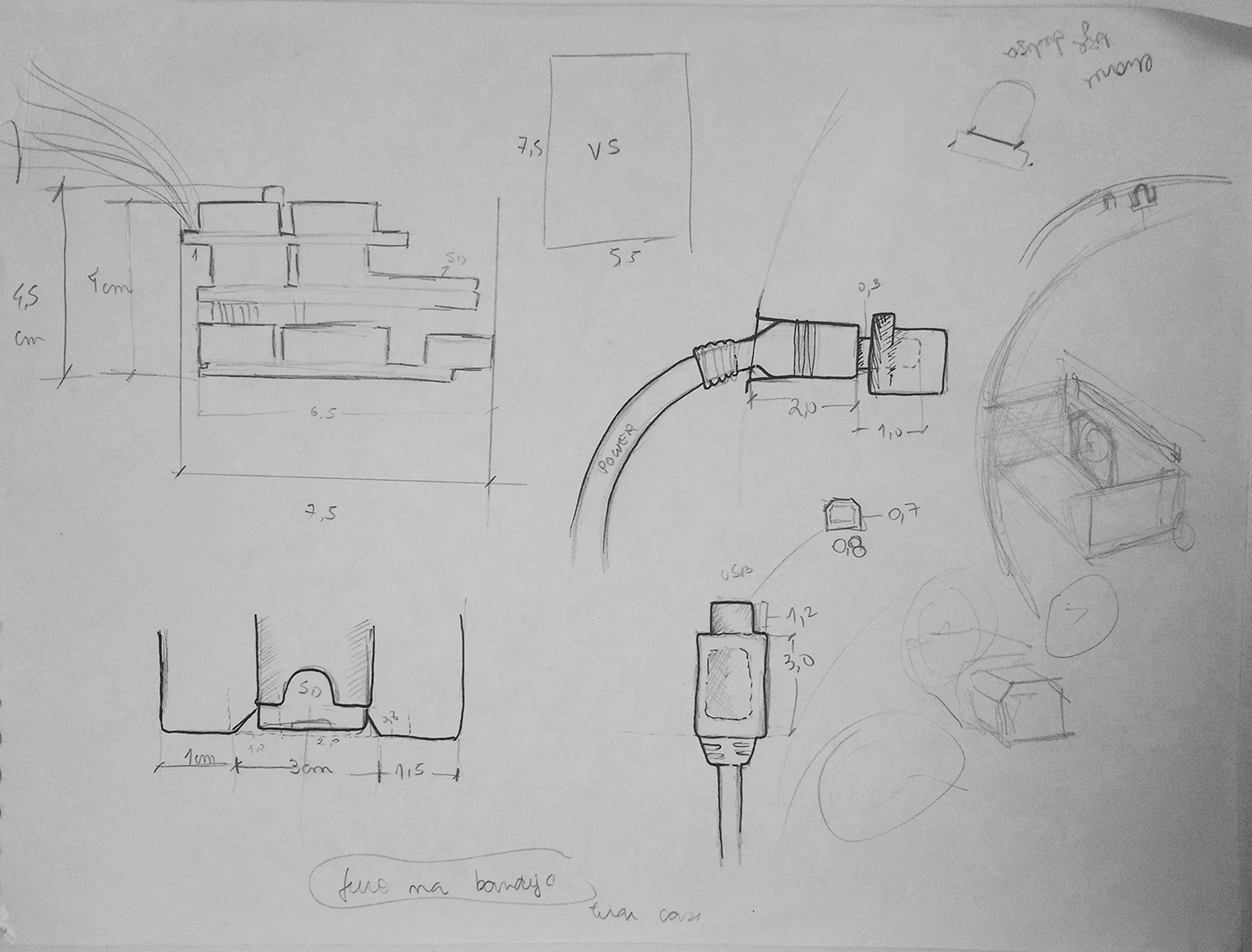
Estudo sobre tamanhos e encaixes dos elementos eletrônicos como entrada para SD card, USB, energia etc.
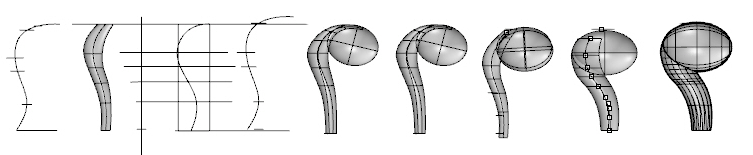
Desenvolvimento do caule
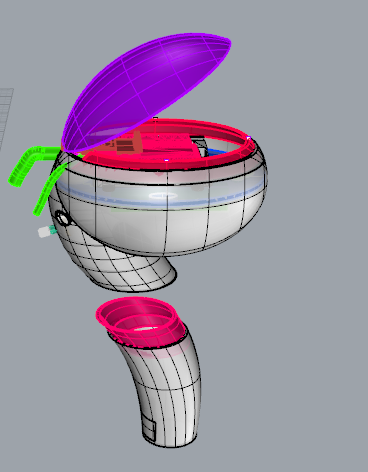
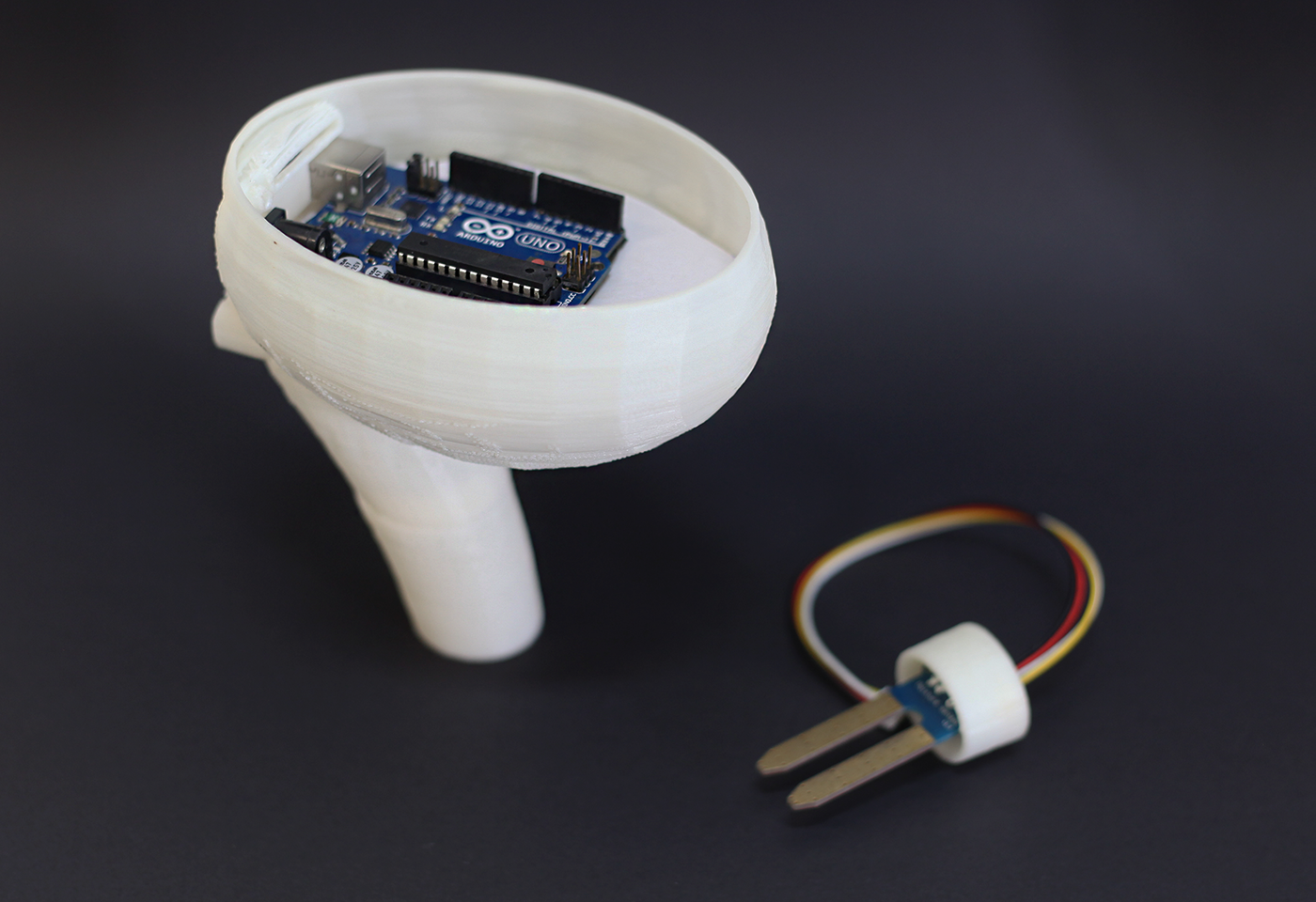
O Hiperbot 2.0 se caracteriza pela existência de anexos, como mostra na figura abaixo, que no caso, possui um encaixe por atrito e pressão para se conectar com o restante do corpo. Ao final deste anexo, em sua parte interna existe um encaixe para o sensor de umidade, que fica devidamente escondido e protegido, o encaixe do sensor foi pensado para impedir também a entrada de terra e umidade excessiva.. A ideia é gerar mais anexos com diversas funções para os próximos modelos, como a possibilidade de anexo com três pernas imitando tentáculos, ou acoplando câmeras etc.
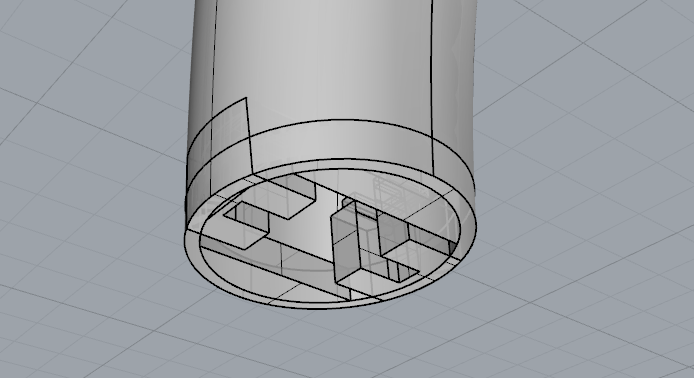
Encaixe do sensor de umidade no anexo inferior
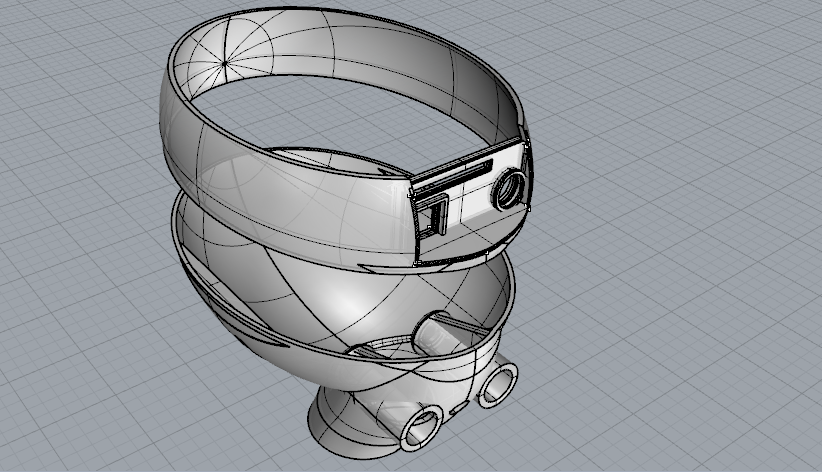
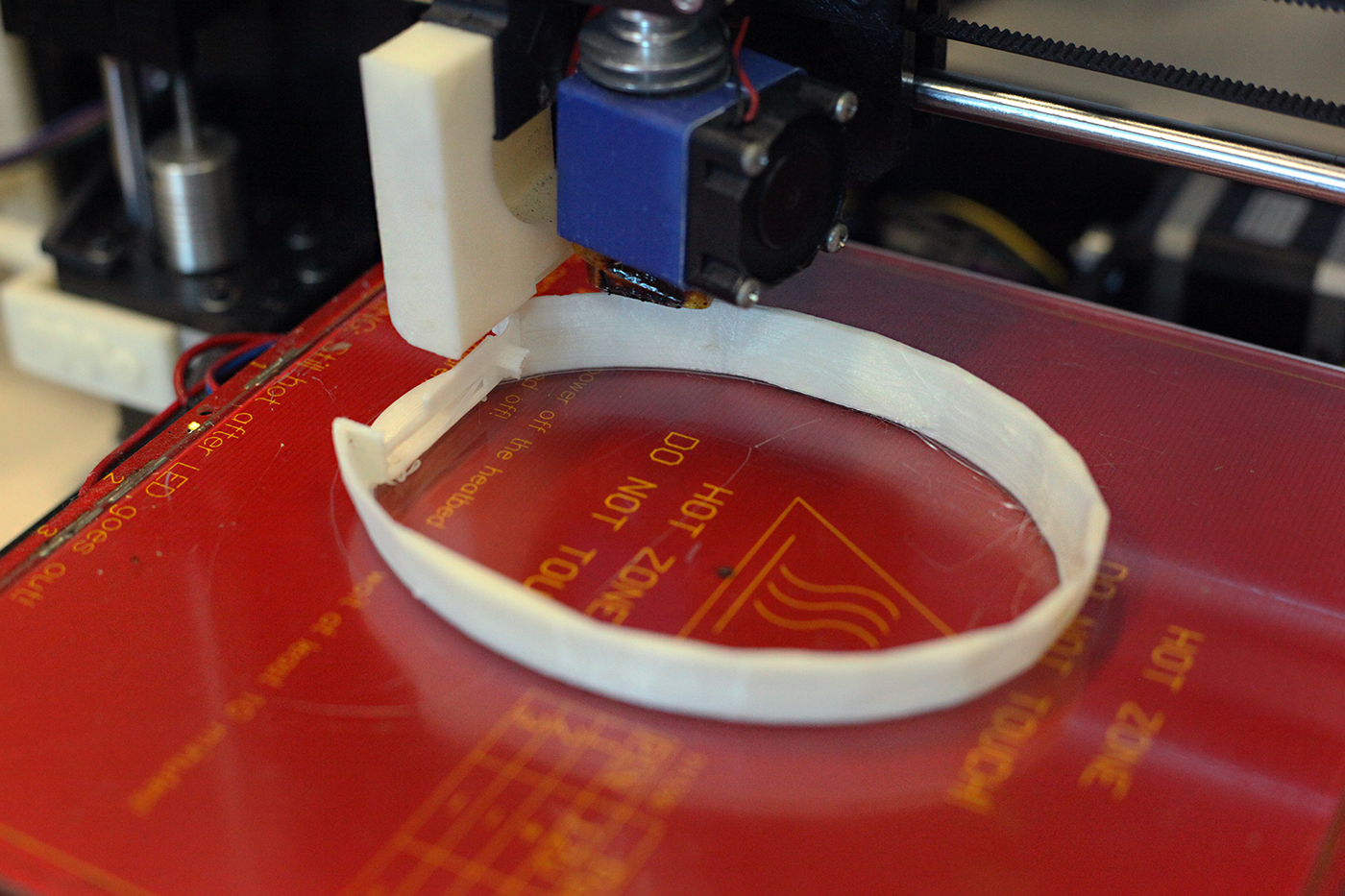
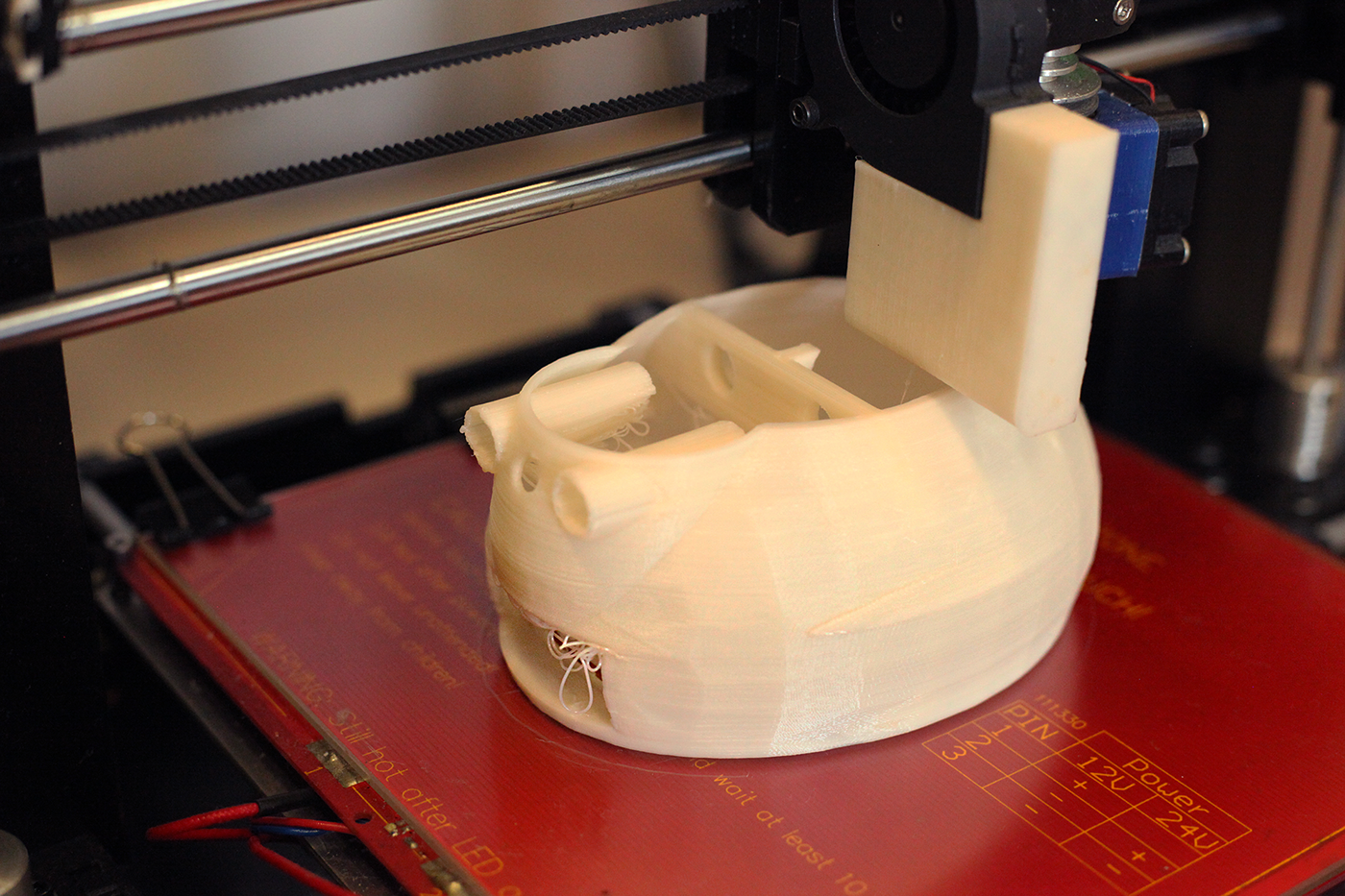
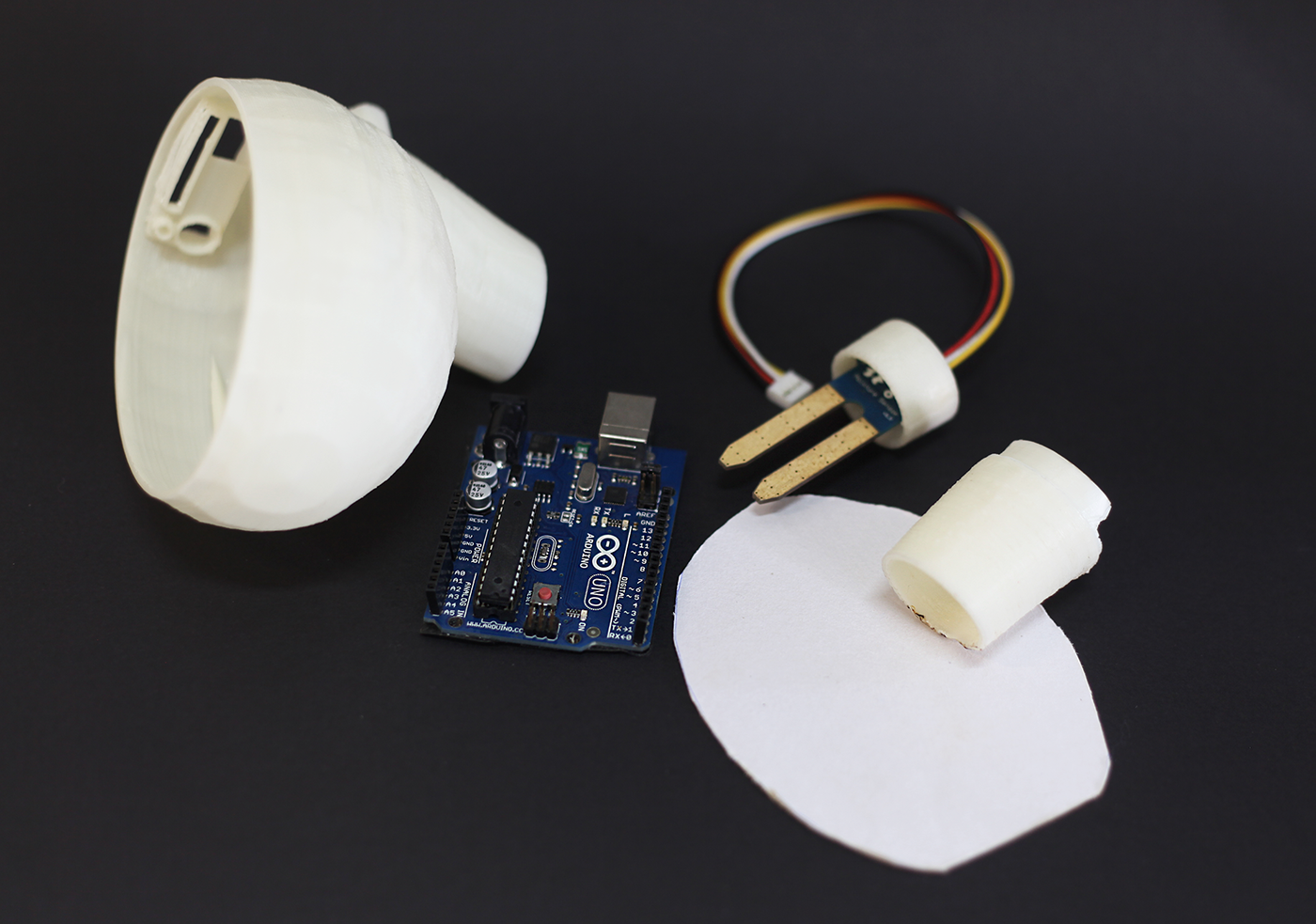
Foi pensado no Hiperbot ser impresso de duas maneiras, com o corpo divido (como na figura baixo) ou inteiriço, esta decisão se deu para realizar de uma maneira mais rápida o teste de tolerância dos furos. O corpo inteiriço foi impresso para se ter um resultado mais satisfatório pois não haveriam emendas.

Fabricação
A impressão 3D foi o método escolhido devido a facilidade que este meio proporciona, visto que é possível fazer pequenos testes para conferir se os encaixes e tolerâncias são eficientes, além de ser relativamente rápido comparado à métodos que precisam fazer moldagens.
Configurações de impressão:
Material: ABS
Altura da camada: 0.2 mm
Solid Layers – Top: 3
Solid Layers – Bottom: 4
Infil: 100%
Pattern Infill: Concêntrico
Temperatura extrusão: 225ºC
Temperatura da mesa: 110ºC
Tempo de impressão total do projeto: 8h30

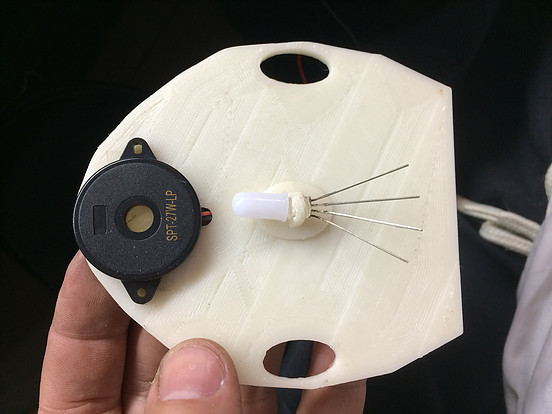
Bandeja para fixação do Shield, Led RGB e Piezo.
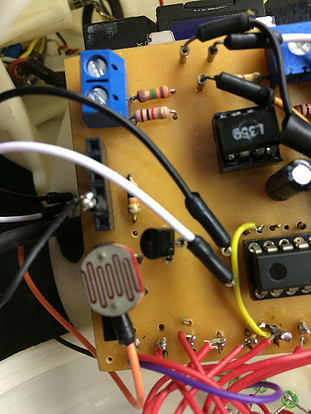
Detalhe do Shield

Confecção do Shield para Arduíno que fica no interior do Hiperbot.
Hiperbot na Amazônia
O projeto foi levado pelo professor Guto Nóbrega até a região Amazônica em uma residência artística que acorreu no mês de Setembro de 2016, sendo utilizado para analisar os sinais das plantas nativas da região.

Foto: Guto Nóbrega

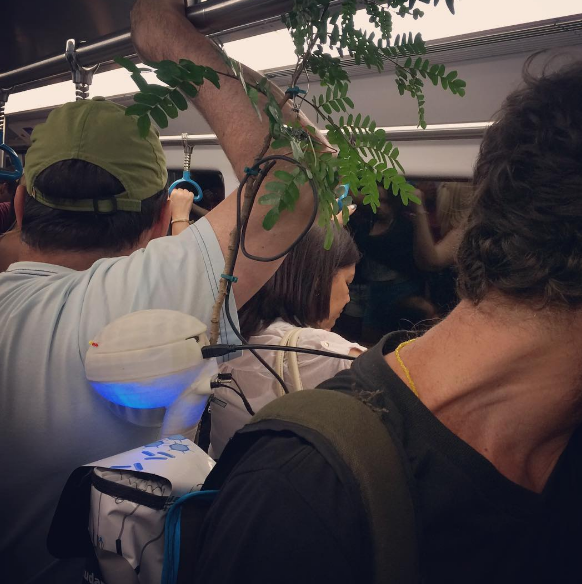
Preparação e ida do Hiperbot para o Projeto Mudapé de Rodrigo Paglieri
O Projeto MUDAPÉ é uma ação de arte/ativismo que consiste numa caminhada de 35 dias do Rio de Janeiro a Bento Rodrigues – Mariana/MG levando uma muda de Pau Brasil para plantar no local, no mês em que completa um ano da tragédia ambiental provocada pela mineradora Samarco. A muda viajará numa mochila desenhada especificamente para a função e será monitorada por um Hiperbot, um sistema composto de 4 sensores na forma de uma criatura robótica criada pelo NANO, parceiros do projeto.
Para saber mais sobre o projeto:


O NANO fará o monitoramento da muda durante o projeto. Esse monitoramento nos permitirá ter uma noção das variações eletrofisiológicas da planta durante o percurso.
Estas informações permitirão estabelecer parâmetros para os cuidados que se deve ter no trajeto para garantir o bem estar da muda de Pau Brasil, assim como uma posterior leitura dos eventos que afetaram a trajetória.
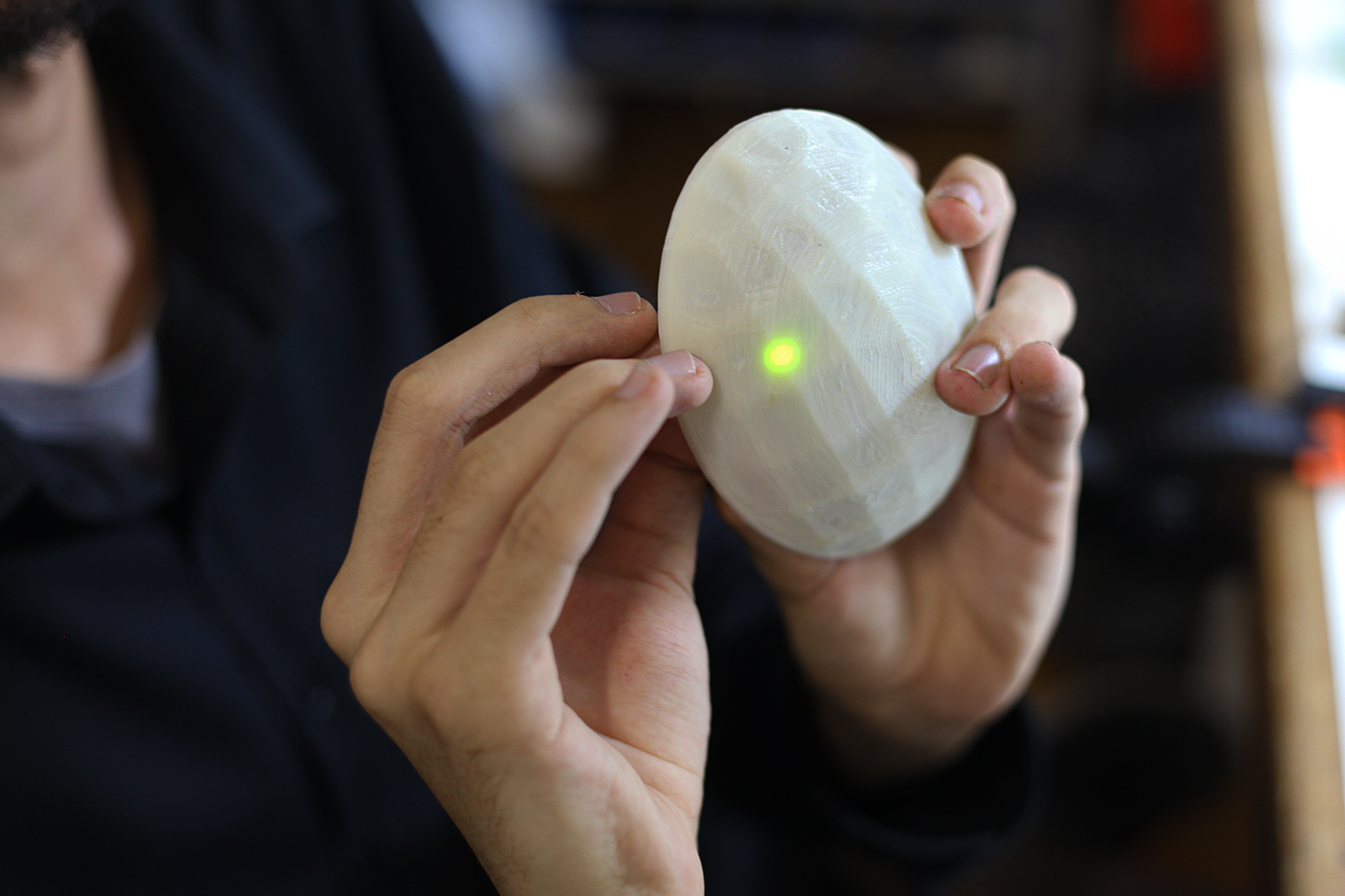
Além dos sensores que fazem o monitoramento do vegetal, o Hiperbot é capaz de mostrar variações luminosas em seu corpo, assim como através de uma sequência de leds que demonstram visualmente, em tempo real, as variações da resposta galvânica.

1 Comments
gutonobrega
Super!!!
Comments are closed.