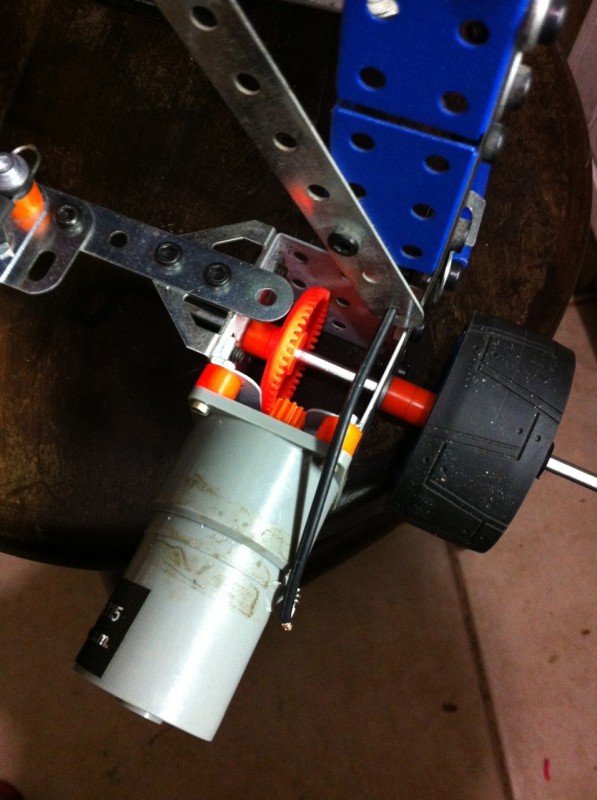
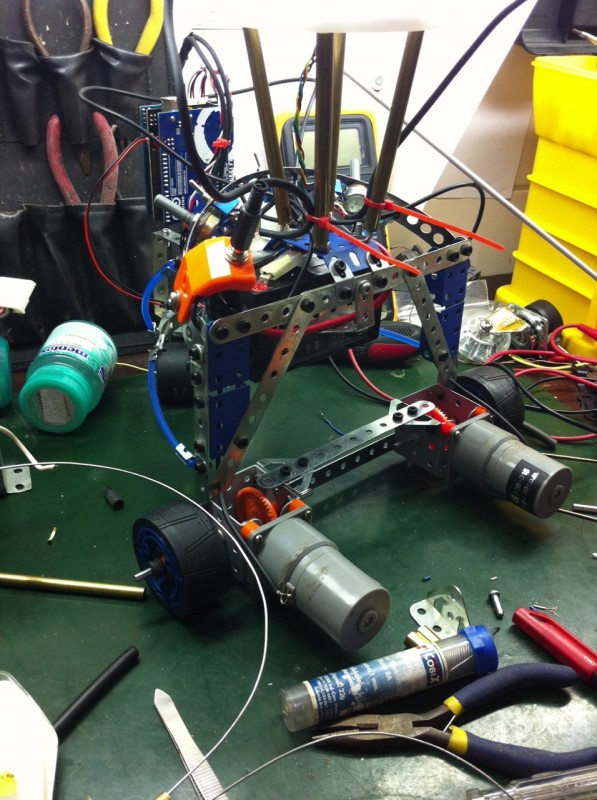
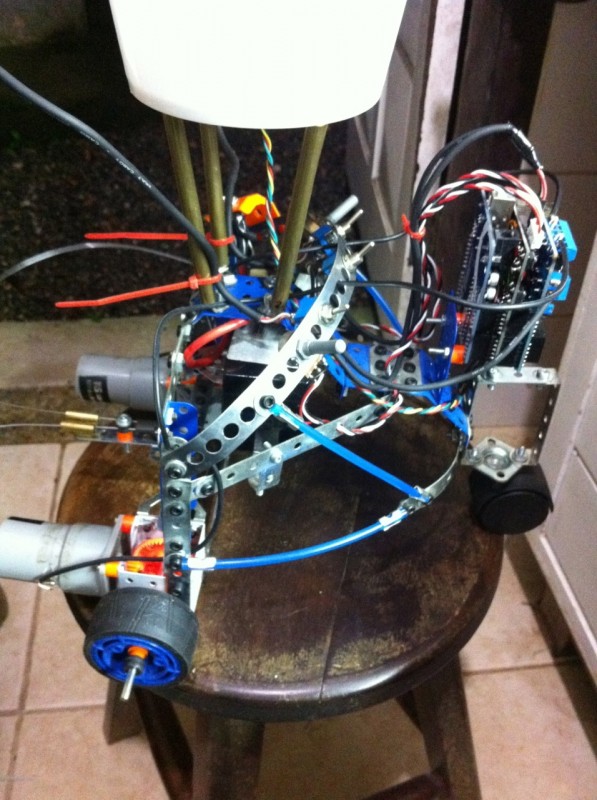
Depois de dois shields queimados (um por descuido, inverti a alimentação externa de 12 volts e “fritei” o integrado. No outro shield um dos chips parou de funcionar, creio que devido ao excesso de corrente pois o motor não estava aguentando o peso do vaso com planta e tudo mais….) reestruturei o chassis do robô e coloquei dois motores de 12 volts com redução. O chassis está mais compacto e robusto. Acrescentei dois “bigodes” para reverter o motor caso o robô esbarre em um obstáculo (old stile). Inclui também uma tomada para carga da bateria durante a noite. Agora falta apenas dois LDRs e programação. Vejam as fotos.

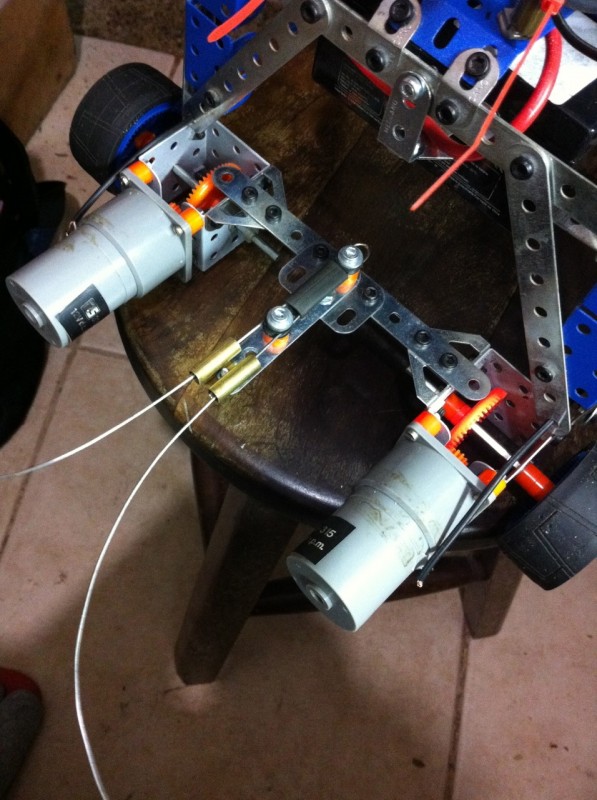
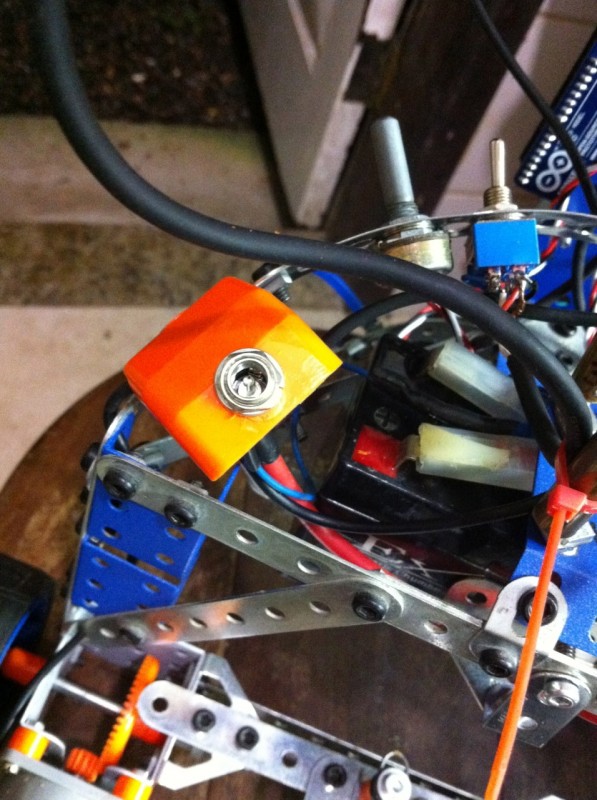
Chave reversora customizada
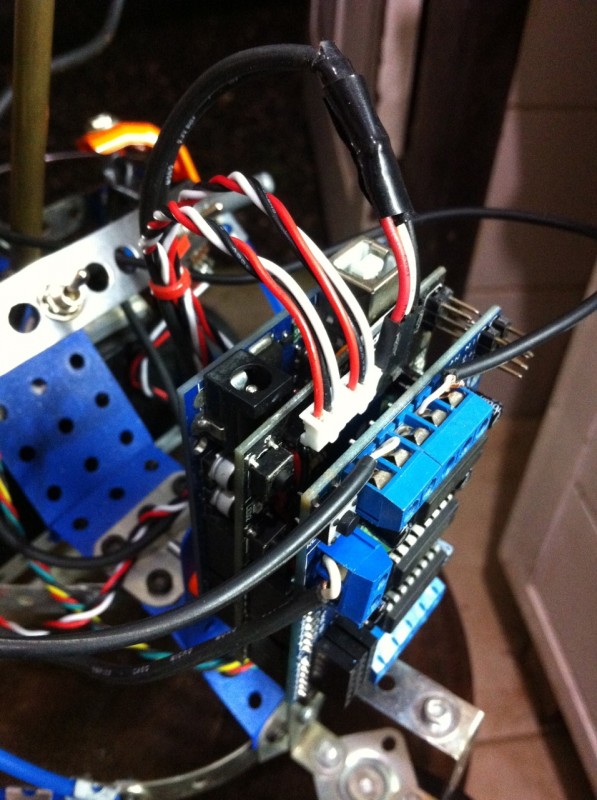
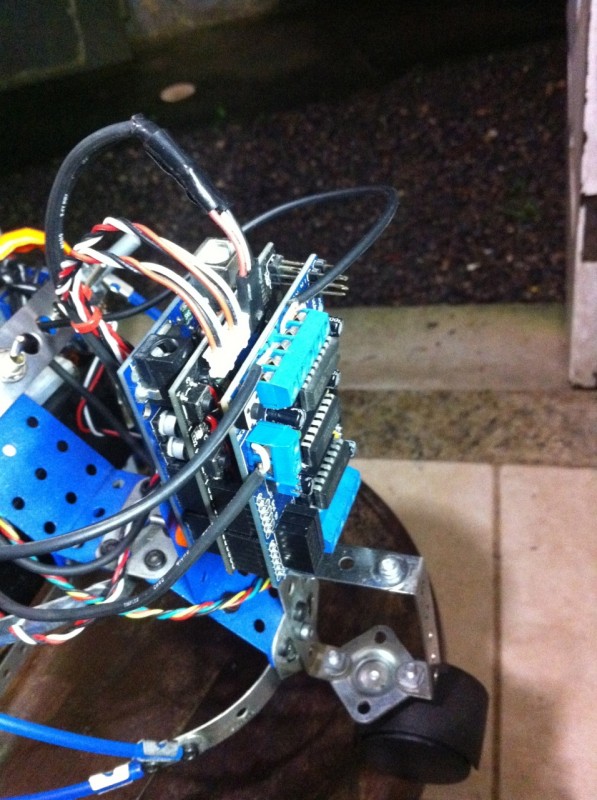
Novo posicionamento dos shields e arduino
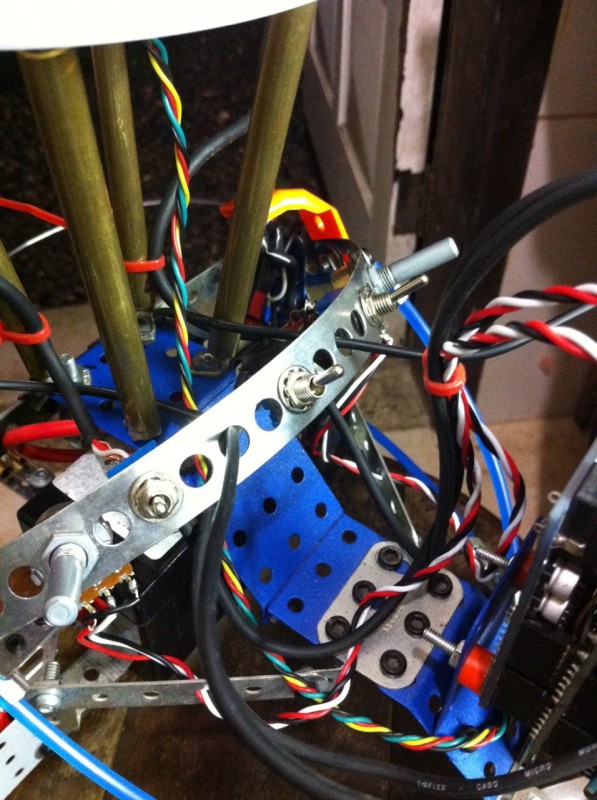

Regulagem do GSR
Fêmea para recarga da bateria de 12 volts